
ERRATA
Foi encontrado uma divergência entre o manual e as peças do kit. Na página 16 do manual impresso em 2011.May.26 G00560, (fig. 1) o tipo de ball link em destaque não vem no kit para esta montagem e sim os da pagina 11 (fig. 2). Observe na fig. 1 a medida do link de 48mm e na fig. 2 de 47mm o que sugere ball links diferentes.

Fig. 1 - Pag. 16

Fig 2 - Pag. 11
SUGESTÕES1. Utilize uma extensão de servo de 15cm para o servo do Rudder.
2. Procure utilizar dois receptores satélites.
3. Evite cortar o fios do ESC Phoenix Ice HV 80A.
4. Se você seguir a montagem na sequencia do manual, deixe para instalar o Motor Pinion Gear Mount (suporte do eixo do motor) após a montagem do motor e ao apertar os quatro parafusos, faça em X. O mau posicionamento deste suporte pode danificar o rolamento presente nesta peça.
5. Ao comprar baterias 6S verifique o tamanho, o espaço disponível é de apenas 50x49mm (largura x altura) no suporte das baterias.
6. A Bateria LiPo 6S de 3300mAh é a que oferece na maioria das vezes o melhor custo/performance.
7. Segue modelos de baterias 6S 22.2V:
- ALIGN 6S1P 3300mAh 40C
- Hyperion G3 EX 3300mAh 45C
- PULSE 3300mAh 45C
- OUTRAGE NRG35 3300mAH 35C
- Turnigy nano-tech 3300mah 45C
- Thunder Power 3300mAh 45C
- Thunder Power 3300mAh 45C
- Voltz 3700mAh 35C



2. Plug o conector do BIND no 3GX e ligue o BEC. O LED dos satélites irão piscar rapidamente indicando que está em modo de bind. Ligue o seu TX prescionando o botão de bind (não solte até o LED dos satélites pararem de piscar). Após constatar que o LED dos dois satélites ficarem constantemente aceso, solte o botão do TX. Remova o conector do bind e em seguida desligue o BEC.

CONFIGURAÇÕES
1. Atualização e Configurando o 3GX
- Faça Download da nova versão 1.1 e instale no seu computador. Execute a instalação como Administrador. Após finalização execute o programa 3GX para instalação do driver USB. http://video.align.com.tw/3g_update/ALIGN_3GX_V1.1.rar
- Ligue o cabo USB com a interface no seu computador para concluir a instalação do driver USB.
- Ligue o BEC para energizar o 3GX e interligue o cabo de dados a porta DATA do 3GX e em seguida pressione o botão da interface para interligar ao cabo de dados (o botão da interface deve ser pressionado para isolar a energia da porta USB). Verifique se o status da conexão está ativa e pressione o botão OK na tela da figura 5, selecionando em seguida o arquivo 3GX_Update V1.1.exe para atualização do sistema Flybarless.



2. Para configurar o 3GX, ligue o TX e em seguida o BEC com o botão SET da unidade FBL pressionado e libere quando os cinco Leds piscarem em sequencia.
- Led DIR
. Verifique o movimento dos servos se estão corretos
. Em 50% do THR do TX, veja se o Pitch se encontra em 0º. O Collective Pitch deve variar de -12º a +12º.
. Com as pás paralelas ao helicóptero configure o Cyclic Pich para máximo de 9º.
. Pressione o botão SET para mudar para o próximo passo.


- Led E.LIM (Limite do Elevator)
. Mantenha o stick do THR em 50%
. Leve o stick do Elevator a 100% do curso, pare 2 segundos e retorne a posição central.
. Pressione o botão SET para mudar para o próximo passo.
- Led E.REV (Reverso do Elevator)
. Mantenha o stick do THR em 50%
. Incline o helicóptero para frente e observe se a bailarina se move em sentido contrario do movimento. Caso a bailarina esteja com movimento no mesmo sentido, use o stick do elevator para cima ou para baixo de forma a corrigir o movimento.
. Pressione o botão SET para mudar para o próximo passo.

3. Para configurar o ESC Phoenix Ice HV 80A, é necessário o uso do Castle Link.
Configuração com Fixed-Endpoints:
Vehicle Type Helicopter
Throttle Type Fixed-Endpoints
Initial Spool-Up Rate 2
Head Speed Change Rate 5
Auto Rotate Enabled True
Governor Mode Type Simple
Cutoff Voltage Auto Li-Po (Default)
Auto-Lipo Volts/Cell 3.2 Volts/Cell (Default)
Current Limiting Insensitive (120A)
Cutoff Type Soft Cutoff
Motor Start Power Medium (59) (Default)
Motor Timing Normal (5) (Default)
Direction Forward (Default)
PWM Rate 8 Khz
Power-On Beep Enabled (Default)
Data Log Enabled 255
Sample Frequency 1 Sample / Sec (Default)
Device Name Phoenix ICE HV 80 (F367)
Current Firmware V 3.27
Configuração com o Governor:
Vehicle Type Helicopter
Throttle Type Governor Mode
Governor Gain Low (11)
Initial Spool-Up Rate Medium (2)
Head Speed Change Rate High (15)
Auto Rotate Enabled True
Governor Mode Type Fixed
Vehicle Setup - Battery Type LiPo
Vehicle Setup - Number of Cells 12
Vehicle Setup - Battery Voltage 44.4000
Vehicle Setup - Gear Ratio 8.615
Vehicle Setup - Motor Kv 510
Vehicle Setup - Motor Number of Poles 10
Desired Head Speed 1 1900 (30%) Take off and landing
Desired Head Speed 2 2000 (70%)
Desired Head Speed 3 2200 (100%)
Cutoff Voltage Auto Li-Po (Default)
Auto-Lipo Volts/Cell 3.2 Volts/Cell (Default)
Current Limiting Insensitive (120A)
Cutoff Type Soft Cutoff
Motor Start Power Medium (59) (Default)
Motor Timing Normal (5) (Default)
Direction Forward (Default)
PWM Rate 8 Khz
Device Name Phoenix ICE HV 80 (F367)
Current Firmware V 3.27



INSTALAÇÃO DO 3GX
1. Utilizamos dois satélites JR EA101 REMOTE RX que foram interligados as portas ANT1 e ANT2 e realizado o processo de BIND com todos os servos conectados ao 3GX. O BIND foi realizado com um TX (rádio) JR DSX11. 2. Plug o conector do BIND no 3GX e ligue o BEC. O LED dos satélites irão piscar rapidamente indicando que está em modo de bind. Ligue o seu TX prescionando o botão de bind (não solte até o LED dos satélites pararem de piscar). Após constatar que o LED dos dois satélites ficarem constantemente aceso, solte o botão do TX. Remova o conector do bind e em seguida desligue o BEC.

CONFIGURAÇÕES
1. Atualização e Configurando o 3GX
- Faça Download da nova versão 1.1 e instale no seu computador. Execute a instalação como Administrador. Após finalização execute o programa 3GX para instalação do driver USB. http://video.align.com.tw/3g_update/ALIGN_3GX_V1.1.rar
- Ligue o cabo USB com a interface no seu computador para concluir a instalação do driver USB.
- Ligue o BEC para energizar o 3GX e interligue o cabo de dados a porta DATA do 3GX e em seguida pressione o botão da interface para interligar ao cabo de dados (o botão da interface deve ser pressionado para isolar a energia da porta USB). Verifique se o status da conexão está ativa e pressione o botão OK na tela da figura 5, selecionando em seguida o arquivo 3GX_Update V1.1.exe para atualização do sistema Flybarless.

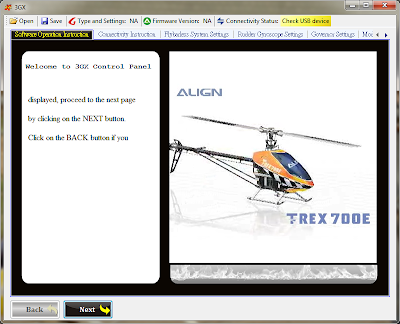
Fig. 3

Fig. 4

Fig. 5

Fig. 6

Fig. 7
- Teste o Failsafe: Ligue o TX e em seguida o BEC. Após o processo de inicialização do 3GX desligue o TX e observe que os servos devem ficar na mesma posição. Se for testar com o motor ligado, tire as pás e verifique que não haverá nenhuma rotação dos rotores.
- Led DIR
. Verifique o movimento dos servos se estão corretos
. Em 50% do THR do TX, veja se o Pitch se encontra em 0º. O Collective Pitch deve variar de -12º a +12º.
. Com as pás paralelas ao helicóptero configure o Cyclic Pich para máximo de 9º.
. Pressione o botão SET para mudar para o próximo passo.


. Mantenha o stick do THR em 50%
. Leve o stick do Elevator a 100% do curso, pare 2 segundos e retorne a posição central.
. Pressione o botão SET para mudar para o próximo passo.
- Led E.REV (Reverso do Elevator)
. Mantenha o stick do THR em 50%
. Incline o helicóptero para frente e observe se a bailarina se move em sentido contrario do movimento. Caso a bailarina esteja com movimento no mesmo sentido, use o stick do elevator para cima ou para baixo de forma a corrigir o movimento.
. Pressione o botão SET para mudar para o próximo passo.
- Led A.LIM (Limite do Aileron)
. Mantenha o stick do THR em 50%
. Mova o stick do Aileron para direita, pare 2 segundos e retorne a posição central.
. Pressione o botão SET para mudar para o próximo passo.
- Led A.REV (Reverso do Aileron)
. Mantenha o stick do THR em 50%
. Incline o helicóptero para direita e observe se a bailarina se move em sentido contrario do movimento. Caso a bailarina esteja com movimento no mesmo sentido, use o stick do aileron para direita ou para esquerda de forma a corrigir o movimento.
. Pressione o botão SET para finalizar o processo.

Configuração com Fixed-Endpoints:
Vehicle Type Helicopter
Throttle Type Fixed-Endpoints
Initial Spool-Up Rate 2
Head Speed Change Rate 5
Auto Rotate Enabled True
Governor Mode Type Simple
Cutoff Voltage Auto Li-Po (Default)
Auto-Lipo Volts/Cell 3.2 Volts/Cell (Default)
Current Limiting Insensitive (120A)
Cutoff Type Soft Cutoff
Motor Start Power Medium (59) (Default)
Motor Timing Normal (5) (Default)
Direction Forward (Default)
PWM Rate 8 Khz
Power-On Beep Enabled (Default)
Data Log Enabled 255
Sample Frequency 1 Sample / Sec (Default)
Device Name Phoenix ICE HV 80 (F367)
Current Firmware V 3.27
Configuração com o Governor:
Vehicle Type Helicopter
Throttle Type Governor Mode
Governor Gain Low (11)
Initial Spool-Up Rate Medium (2)
Head Speed Change Rate High (15)
Auto Rotate Enabled True
Governor Mode Type Fixed
Vehicle Setup - Battery Type LiPo
Vehicle Setup - Number of Cells 12
Vehicle Setup - Battery Voltage 44.4000
Vehicle Setup - Gear Ratio 8.615
Vehicle Setup - Motor Kv 510
Vehicle Setup - Motor Number of Poles 10
Desired Head Speed 1 1900 (30%) Take off and landing
Desired Head Speed 2 2000 (70%)
Desired Head Speed 3 2200 (100%)
Cutoff Voltage Auto Li-Po (Default)
Auto-Lipo Volts/Cell 3.2 Volts/Cell (Default)
Current Limiting Insensitive (120A)
Cutoff Type Soft Cutoff
Motor Start Power Medium (59) (Default)
Motor Timing Normal (5) (Default)
Direction Forward (Default)
PWM Rate 8 Khz
Device Name Phoenix ICE HV 80 (F367)
Current Firmware V 3.27
Um comentário:
Muchas Gracias... muy bueno, felicitaciones.
Muito brigado.... parabeins.
jgiosa@yahoo.com
Postar um comentário