Configurando o Rádio (TX)
Para configurar o rádio (usamos o JR DSX11), selecionamos uma memoria livre e executamos os passos:
TYPE SELECT - HELI. Não selecionamos ACRO devido a facilidade de configurar a chave CONTROL MODE SWITCH
SWASH TYPE - 1 Servo NORM
REVERSE SW - NORM permaneceu na configuração padrão, todos normal
DEVICE SELECT - GEAR SW GYR. Usaremos este canal para chave de três posições disponível no rádio
GYRO SENS - AUX 2. Usaremos a chave AUX 2. Os valores para POS 0, 1 e 2 serão definidos na configuração da unidade MC
Finalizado a configuração do TX, faça o BIND com o seu receptor.
Atualizando o MC
Realizamos o download do NAZA_Assistant e instalamos em um notebok com Windows 7.
A URL abaixo contém toda documentação e software necessários para montagem e configuração do Naza MC.
http://www.dji-innovations.com/files/naza/
NAZA_Assistant.zip
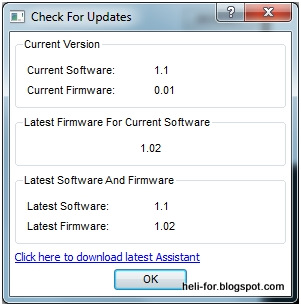
Após concluir a instalação, ligue o cabo USB ao VU e ao notebook e ligue a bateria LiPo. Execute o "DJI NAZA Assistant" e siga os passos das imagens abaixo. Faça o registro e após concluido realize a atualização do Firmware.
Faça a atualização.
Confirme na tecla Yes.
Terminado a atualização você receberá a janela abaixo para desligar e religar a bateria.
Configurando o MC
Inicie novamente o Assistant para realizar a configuração do NAZA com o TX ligado, o cabo USB interligando o VU e o notebook e em seguida ligue a bateria que alimenta a eletrônica do Quad.
Motor Mixer
1. Mixer Type - selecione a opção Quad-rotor X ou outra se preferir. Observe que esta orientação dos motores deve ser conferida antes de colocar as Hélices.
TX MONITOR
1. Receiver Type - configuramos Tradition devido o uso de receptor DSM2.
2. Cut Off Type - ficou em Intelligent.
3. Command Sticks Calibration - para executar a calibragem dos sticks do rádio, é necessário selecionar o botão START e em seguida movimentar os dois Sticks na extremidade máxima em relação ao centro, em movimentos circulares e finalizar no botão FINISH.
NORM/REV - selecione todos em NORM e passe para reverso se o indicador se deslocar para esquerda nos procedimentos abaixo:
T - movimente o stick do Throttle para cima, o indicador deve deslocar para direita
R - movimente o stick do
Rudder para direita, o indicador deve deslocar para direita
E - movimente o stick do
Elevator para cima, o indicador deve deslocar para direita
A - movimente o stick do Aileron para direita, o indicador deve deslocar para direita.
4. Sticks Monitor - Este passo é opcional. X1 e X2 são utilizados para ajustar o ganho remoto. Não utilizamos esta opção.
5. Control Mode Switch - selecione no rádio o Menu de GYRO SENS em POS0: com a Chave AUX2 em posição 0 altere o valor até a Faixa Azul cobrir a letra A. Veja imagem abaixo que foi configurado o Modo Attitude.
Menu de GYRO SENS em POS1: com a Chave AUX2 em posição 1 altere o valor até a Faixa Azul cobrir a letra M. Veja imagem abaixo que foi configurado o Modo Manual.
Menu de GYRO SENS em POS2: com a Chave AUX2 em posição 2 altere o valor até a Faixa Azul cobrir a Fail-Safe. Veja imagem abaixo que foi configurado o Modo Fail-Safe.
AUTOPILOT
1. Basic Parameters - configure os valores apresentados na imagem abaixo como parâmetro inicial e mude para atender suas necessidades. Estes foram os últimos valores que adotamos.
GIMBAL
Não usamos esta funcionalidade.
VOLTAGE MONITOR
Adotamos a configuração mostrada abaixo para monitorar a voltagem da bateria LiPo 3S.
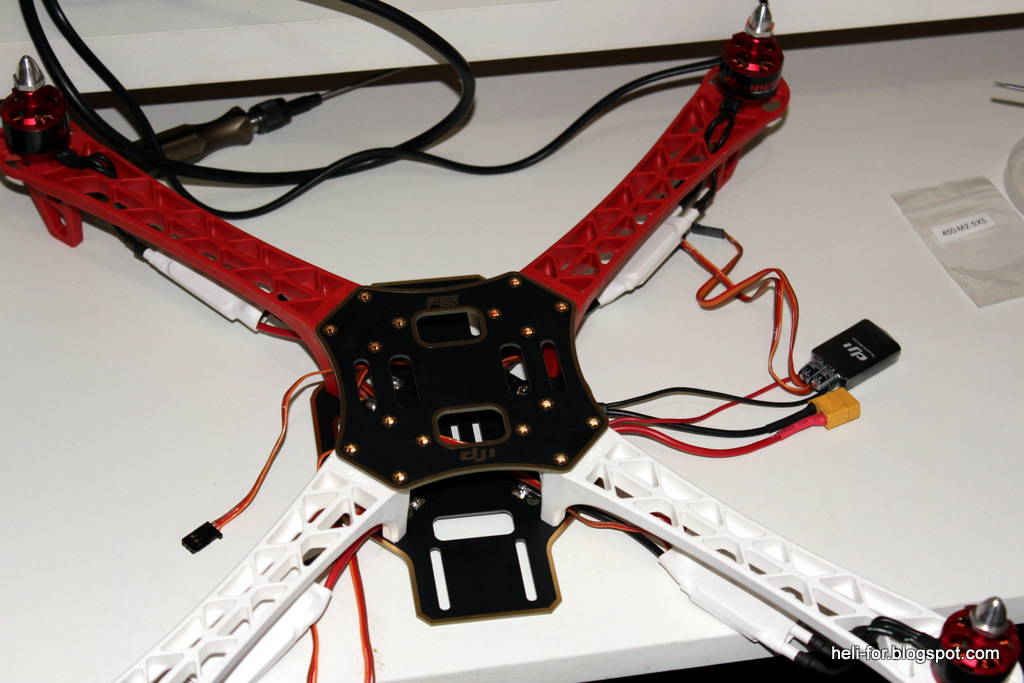
INSTALAÇÃO DAS HÉLICES
Antes de instalar as hélices, verifique a rotação dos motores e em caso de divergência como mostrado na figura abaixo, inverta a conexão do ESC.
Siga o orientação das Hélices como mostrado abaixo.
M1 e M3
M2 e M4
Completamos aqui os passos necessários para montar e configurar o Quad da DJI com o NAZA & F450.
No próximo Post estaremos finalizando com uma avaliação do NAZA & F450.
Parte 5
.